AUTOSAR 入门教程(4)MemStack(一)
🚨 AUTOSAR 的 Memory Stack 是车载 ECU 开发中最关键也最容易出错的模块之一,它直接关系到车辆数据的可靠存储与快速访问。本文将深入解析 🔍 NvM 模块 的核心机制与最佳实践,帮助开发者避开常见的内存管理陷阱。
🏗️ 1. Memory Stack 架构解析
在 AUTOSAR 分层架构中,Memory Stack 是由一组模块组成的内存管理体系:
- 🔧 服务层:NvM(非易失性内存管理器)
- 🔌 ECU 抽象层:MemIf(内存接口)、Fee(Flash EEPROM 仿真)、Ea(EEPROM 抽象)
- 💽 MCAL 层:Fls(Flash 驱动)、Eep(EEPROM 驱动)
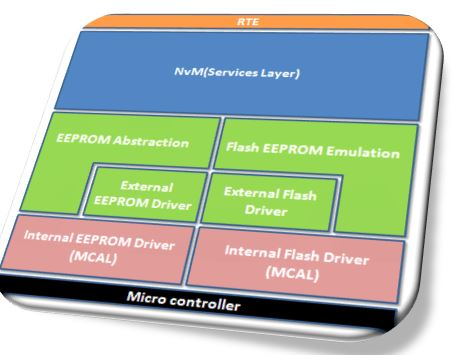
💡 关键设计原则:上层模块通过标准接口访问底层驱动,实现硬件无关的内存操作
⚙️ 2. NvM 模块服务类型对比
2.1 🔄 同步 vs 异步服务
| 特性 | 同步服务 | 异步服务 |
|---|---|---|
| 调用方式 | 阻塞式 | 非阻塞式 |
| 完成通知 | 轮询状态 | 回调函数 |
| 适用场景 | 简单操作 | 耗时操作 |
2.2 📋 典型服务函数
- 📥
NvM_ReadBlock():同步读取 - 📤
NvM_WriteBlock():同步写入 - 🔢
NvM_SetDataIndex():设置数据集索引
🧩 3. NvM Blocks 配置实战
3.1 🔍 四种核心内存对象
1️⃣ NV block(必需)
- 包含 block header + 数据区 + 可选 CRC
2️⃣ RAM block(必需) - 数据读写的高速缓存
3️⃣ ROM block(可选) - 故障恢复的默认值
4️⃣ Administrative block(必需) - 状态标记 + 数据长度
3.2 📊 三种 Block 类型配置
| 类型 | NV blocks | RAM block | ROM block | 典型应用 |
|---|---|---|---|---|
| Native | 1 | 1 | 1(可选) | 常规参数 |
| Redundant | 2 | 1 | 1(可选) | 安全关键数据 |
| Dataset | 1-255 | 1 | 1-n | 多配置参数 |
⚠️ 配置建议:冗余块建议用于里程、故障码等关键数据
🔄 4. 请求处理流程详解
4.1 🔄 单块请求流程(高频场景)
graph TD
A[应用调用 NvM_ReadBlock] --> B[NvM 转发请求到 MemIf]
B --> C{存储类型?}
C -->|Flash| D[Fee → Fls]
C -->|EEPROM| E[Ea → Eep]4.2 🔄 多块请求流程(系统级操作)
1️⃣ 启动时:NvM_ReadAll 恢复 RAM 数据
2️⃣ 关闭时:NvM_WriteAll 保存 RAM 数据
3️⃣ 典型触发点:
- EcuM_Startup → 恢复运行时状态
- EcuM_Shutdown → 保存用户设置
🏆 5. 最佳实践与避坑指南
- ⚠️ 异步回调陷阱:确保回调函数执行时间 < 1ms
- ✅ CRC 校验:建议对安全相关数据启用
- 🔧 块大小优化:
- Flash 块对齐:4KB 倍数
- EEPROM 块:不超过页大小
- ❗ 错误处理:
- 实现
NvM_JobErrorNotification - 记录最后一次成功操作
- 实现
💡 实战建议:开发阶段启用
NvM_SetBlockProtection防止误写
通过合理配置 Memory Stack,开发者可以构建既满足功能安全要求,又具备高性能的内存管理系统。下一期我们将深入探讨 Fee 模块的磨损均衡算法实现。✨